中国工程物理研究院 激光聚变研究中心,四川绵阳621900
针对过盈微装配中弱微零件易损的问题,以激光惯性约束聚变(Inertial Confinement Fusion,ICF)研究中微靶关键部件—冷冻罩(Thermomechanical Package,TMP)组件装配作为研究对象,开展弱微零件过盈装配方法研究。首先,针对装配空间狭小及存在视觉遮挡,导致难以实现装配过程中硅臂形变检测的问题,提出了基于灰度变化的形变检测方法并建立了小爪灰度—形变模型;然后,针对受到显微视觉检测精度影响,硅臂与套筒微小位姿偏差不易检测的问题,基于硅臂受力变形情况分析,提出了硅臂与套筒位姿偏差定性判断方法,实现两者微小位姿偏差的检测;最后,基于零件灰度变化及几何分析,提出了微装配过程位姿偏差定量计算方法并设计了过盈装配控制策略。实验结果证明了所提方法的有效性,并且实现了过盈20~26 μm的TMP组件无损装配。该方法适用于微机电系统制造中微轴孔过盈装配。
弱微零件 形变控制 过盈装配 微装配 weak micro-parts deformation control interference fit micro-assembly 光学 精密工程
2021, 29(10): 2421
Author Affiliations
Abstract
1 Research Center of Laser Fusion, CAEP, Mianyang 621900, China
2 Laboratory of Precision Manufacturing Technology, CAEP, China
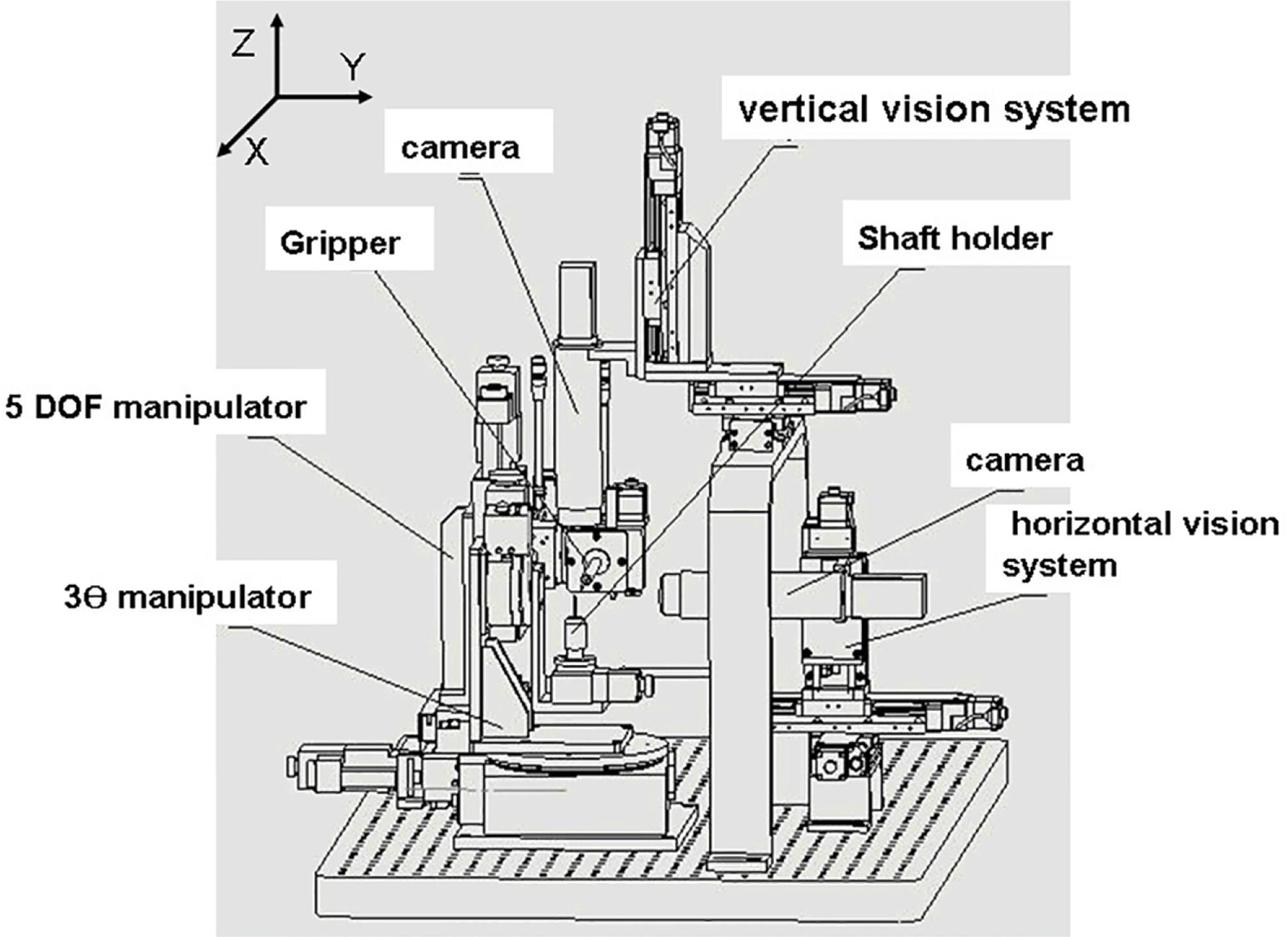
The designs of inertial confinement fusion (ICF) targets, which field on ShenGuang III, are becoming more complex and more stringent in terms of assembly precision. A key specification of these targets is the spatial angle alignment accuracy. To meet these needs, we present a new spatial angle assembly method, using target part’s 3D model-based dual orthogonal camera vision, which is better suited for the flexible automation of target assembly processes. The two-hands structure micromanipulate system and dual orthogonal structure visual feedback system were investigated by considering the kinematics, spatial angle measuring, and motion control in an integrated way. In this paper, we discuss the measurement accuracy of spatial angle assembly method, which compared the real-time image acquisition with the redrawing 2D projection. The result shows that the assembly method proposed is very effective and meets the requirements of angle assembly accuracy, which is less than $1^{\circ }$. Also, this work is expected to contribute greatly to the advancement of other target microassembly equipments.
ICF target fabrication spatial angle target assembly High Power Laser Science and Engineering
2017, 5(2): 020000e9
中国工程物理研究院 激光聚变研究中心, 四川 绵阳 621900
针对微颗粒空间装配的问题, 以外径为十几微米的微颗粒与外径为几百微米的柱腔装配为研究对象, 开展微颗粒空间跨尺度装配方法研究。首先, 针对微颗粒受到基底表面作用力影响不易被拾取与释放的问题, 分析了微颗粒的受力情况, 设计了真空吸附式微夹持器用于微颗粒的拾取与释放; 然后, 针对由于微颗粒与柱腔的尺寸跨度大, 很难实现装配过程中二者空间位置实时监测的问题, 设计了具有多维视觉监测功能的微装配机器人并且建立了多维视觉监测模型, 实现微颗粒与柱腔装配过程的在线监测; 最后, 提出了基于多维视觉监测模型的微颗粒与柱腔空间半自动装配方法。实验结果证明了所提方法的有效性, 并且实现了将外径为20 μm的微颗粒放入外径为200 μm的柱腔内的目标。该方法适用于微机电系统制造中微颗粒的三维空间装配。
微颗粒 微夹持 空间装配 显微视觉 微装配 micro-particle micro-grip space assembly micro-vision micro-assembly









